.webp)










الکتروموتورها بر اساس نوع جریان برق مصرفی، به دو دسته طبقهبندی میشوند:
الکتروموتور جریان مستقیم
- موتور تحریک مستقل جریان مستقیم
- موتور خود تحریک جریان مستقیم
- موتور سری جریان مستقیم
- موتور کمپوند (Compound) جریان مستقیم
الکتروموتور جریان متناوب
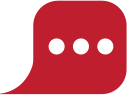
با گسترش شبکههای جریان متناوب و کاربرد روزافزون برق سه فاز به عنوان برق صنعتی، امروزه در بخش اعظم صنایع مختلف، از الکتروموتورهای جریان متناوب و خصوصاً موتورهای الکتریکی سه فاز استفاده میشود. همانطور که از نام آن برمیآید، این دسته موتورهای الکتریکی از جریان متناوب برای تأمین انرژی استفاده میکنند. الکتروموتورهای جریان متناوب نیز به دو دسته تک فاز و سه فاز تقسیمبندی میشوند. اصولاً الکتروموتورهای جریان متناوب نسبت به موتورهای جریان مستقیم دارای ساختار سادهتر، عمر مفید بیشتر و تعمیر و نگهداری راحتتری هستند. به همین خاطر، در اغلب کارخانجات و کارگاهها، به جز موارد خاص، از الکتروموتورهای جریان متناوب استفاده میشود.
الکتروموتور جریان متناوب سه فاز
- الکتروموتور سه فاز سنکرون: در این موتورها، تعداد دور روتور برابر تعداد دور میدان مغناطیسی سیم پیچهای استاتور (قسمت ساکن) است. الکتروموتور سه فاز سنکرون با سرعت ثابتی میچرخد و به همین دلیل، به آن سنکرون یا همسان میگویند. این موتورها به دلیل ساختار پیچیده، راهاندازی مشکل و هزینههای بالای تعمیرات و نگهداری، به جز در موارد خاص مورد استفاده قرار نمیگیرند. مهمترین عیب موتورهای الکتریکی سنکرون این است که خودشان نمیتوانند راهاندازی شوند و بنابراین، باید از یک وسیله کمکی برای راهاندازی آنها استفاده کرد.
- الکتروموتور سه فاز آسنکرون: در الکتروموتورهای آسنکرون، بر خلاف موتور سنکرون، تعداد دور روتور همیشه کمتر از تعداد دور میدان مغناطیسی دوار استاتور است. به همین دلیل، به آنها موتورهای آسنکرون یا ناهمسان گفته میشود. تعداد دور میدان دوار به فرکانس تغذیه موتور و تعداد قطبها بستگی دارد و با بار موتور تغییر نمیکند، اما تعداد چرخش روتور بسته به بار متغیر است. با افزایش بار، سرعت چرخش موتور کاهش مییابد و با کاهش بار، سرعت چرخش موتور افزایش پیدا میکند.
مزایای موتور سه فاز آسنکرون
- ساختار ساده
- قیمت مناسب
- بازده و ضریب قدرت بالا
- نیاز به حداقل تعمیرات
- عدم نیاز به راهانداز جداگانه
- قدرت بیشتر با حجم کمتر
معایب موتور سه فاز آسنکرون
- عدم امکان تغییر سرعت بدون کاهش راندمان
- کاهش سرعت با افزایش بار
- مشکل بودن کنترل سرعت چرخش
- کم و زیاد شدن سرعت چرخش با تغییرات جزئی فرکانس