

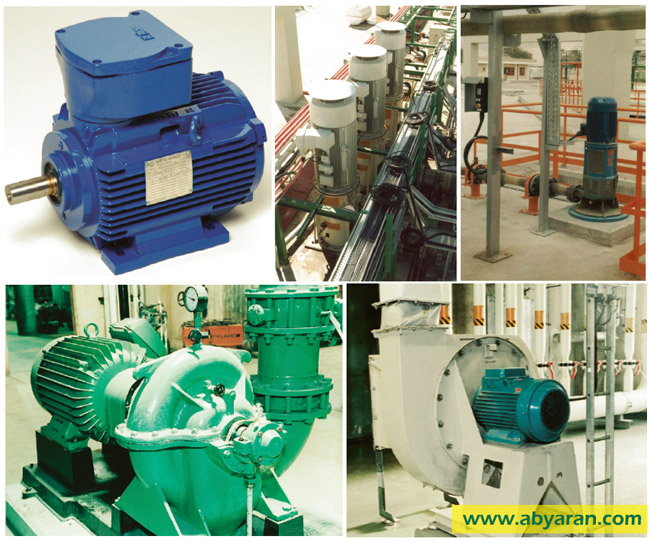
موتورهای القایی سه فاز (الکتروموتورهای سه فاز)، پرکاربردترین موتورهایی هستند که برای به حرکت درآوردن چرخ های صنعت از آنها استفاده میشود. طراحی ساده و مستحکم، قیمت ارزان، هزینه نگهداری پایین و اتصال آسان به منبع سه فاز امتیازات اصلی موتورهای القایی هستند.
با اینکه ساختمان موتورهای القایی سه فاز به مراتب سادهتر از موتورهای DC است. ولی مکانیزم عملکرد، کنترل سرعت و گشتاور در این نوع موتورها نیازمند درک عمیقتری از مفاهیم الکتریسیته و مغناطیس است. این نوع موتور در قدرتهای متنوع (کسری از کیلووات تا چند ده مگاوات) ساخته و بهرهبرداری میشوند.
ساختمان موتور های القایی
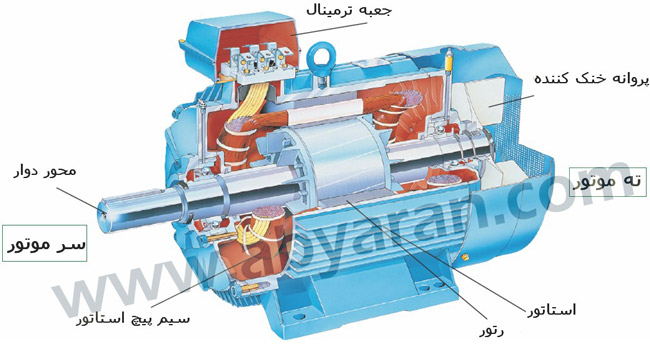
بهطور کلی هر ماشین القایی (موتور یا مولد القایی) از دو بخش استاتور و روتور تشکیل شده است. استاتور بخش ثابت و روتور بخش متحرک ماشین است. هر یک از اجزای ماشین بر حسب عملکردشان بر یکی از این دو بخش قرار میگیرند؛ مثلا پروانه خنک کننده روی روتور نصب میشود.
استاتور
استاتور ماشین القایی، شامل بدنه، هسته مغناطیسی، سیم پیچ ها و یاتاقانهای سر و ته است. هسته استاتور، مجموعهای از ورقهای فولادی که دارای شیار در سطح داخلی آن مطابق شکل است و پس از قرار گرفتن در کنار هم یک حجم استوانهای توخالی را مطابق شکل تشکیل میدهد. سیم پیچهای سه فاز ماشین القایی در داخل همین شیارها قرار میگیرند.
در ماشین های القایی به دلیل تلفات هیسترزی، جنس هسته باید از فولاد الکتریکی با پسماند کم انتخاب شود تا تلفات هیسترزیس ماشین به حداقل ممکن برسد. همچنین برای کاهش تلفات فوکو نیز از روش ورق ورق کردن هسته بهره میگیرند.
ابعاد هسته استاتور به گونهای است که بهراحتی در بدنهی فولادی، چدنی یا آلومینیومی استاتور محکم میشود. این بدنه به صورت پرهدار ساخته میشود تا برای تهویه بهتر، سطح تماس بیشتری با هوای محیط خود (سطح بیرونی) داشته باشد.
وظیفهی بدنه، پوشش نهایی ماشین القایی است که با جای دادن هسته و سیم پیچ ها در خود، ضمن محافظت ماشین در برابر ورود اجسام خارجی امکان نصب ماشین را فراهم میکند. همچنین برای اتصال سیم پیچها روی بدنهی ماشین جعبه ترمینال قرار میگیرد.
به علاوه دو درپوش و یاتاقانهای طرفین ماشین به گونهای طراحی میشوند که قسمت متحرک ماشین (روتور) به راحتی در داخل استاتور بچرخد و تکیهگاه مکانیکی مناسبی برای روتور فراهم شود. این بخش در ساختار الکتریکی ماشین نقشی ندارد و جزو تجهیزات مکانیکی ماشین به حساب میآید. در موتورهای سنگین که جابهجایی آن برای افراد میسر نیست، یک قلاب در بالای بدنه ماشین پیشبینی میشود که بتوان با جرثقیل آن را جابهجا نمود.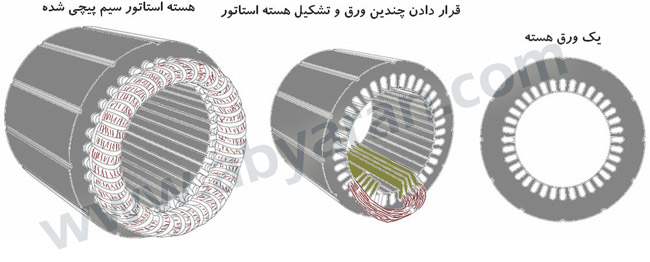


سیم پیچ
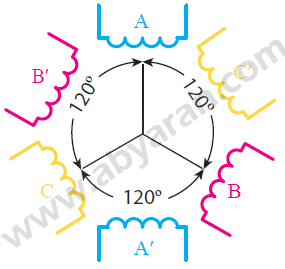
استاتور ماشین القایی سه فاز با توجه به محیط °۳۶۰ دایرهای شکل خود باید حداقل دارای سه سیم پیچ با اختلاف زاویه °۱۲۰ مکانی از هم (شکل ۴) باشد.
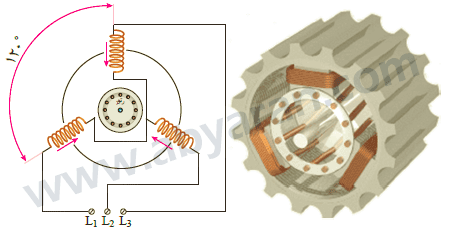
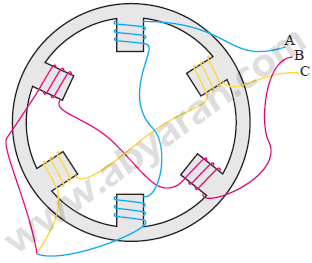
در عمل سیمپیچهای سه فاز استاتور ماشین القایی احتیاج به حداقل ۶ شیار (۵) دارند. سیمپیچ ها به گونهای جاسازی میشوند که هر سیم پیچ با دیگری ۱۲۰ درجه اختلاف فاز مکانی داشته باشد. در این شکل سه دسته سیمپیچ با حروف (׳cc ,׳bb ,׳aa) مشخص شدهاند. در ماشینهای القایی صنعتی شیارهای استاتور بیشتر از این تعداد هستند.
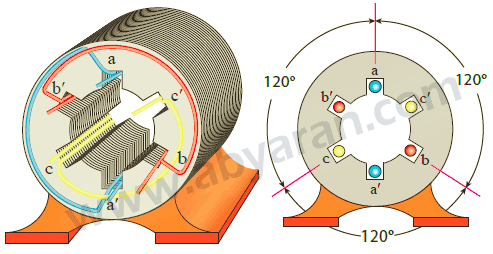
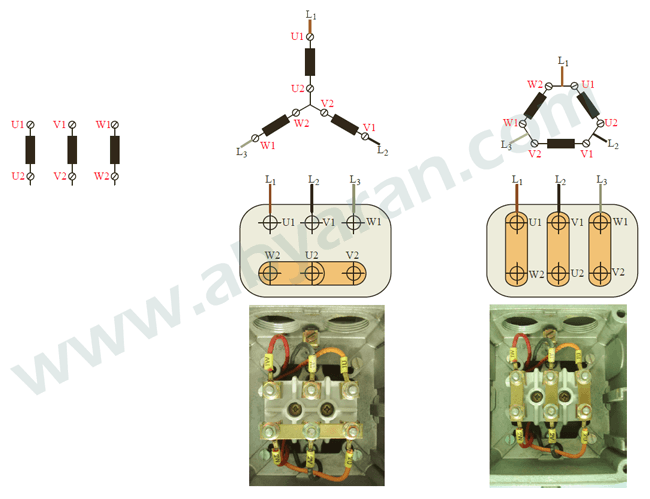
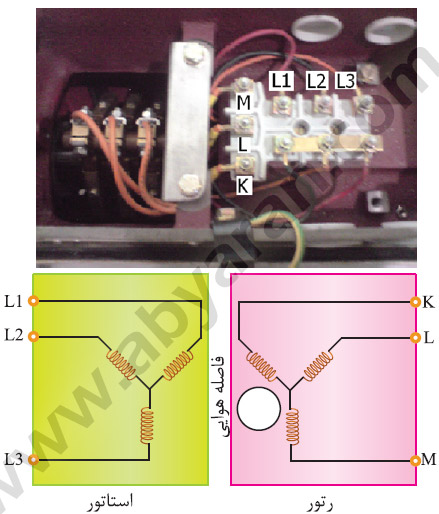
در ماشینهای القایی، سر و ته سیم پیچ ها (׳cc ,׳bb ,׳aa) را به داخل جعبه ترمینال میآورند تا به ترمینالهای خروجی متصل شوند. بدین ترتیب تغییر اتصال ستاره و یا مثلث در جعبه ترمینال بسیار ساده (شکل ۶) است.
روتور
روتور ماشین های القایی بر دو نوع است هسته هر دو نوع روتور از ورقههای مغناطیسی دایرهای شکلی تشکیل شدهاند که از مرکز آن محور فولادی روتور عبورکرده است. محور فولادی روتور باید از نظر مکانیکی از استحکام کافی برخوردار باشد ولی از نظر خاصیت مغناطیسی ضعیف باشد.
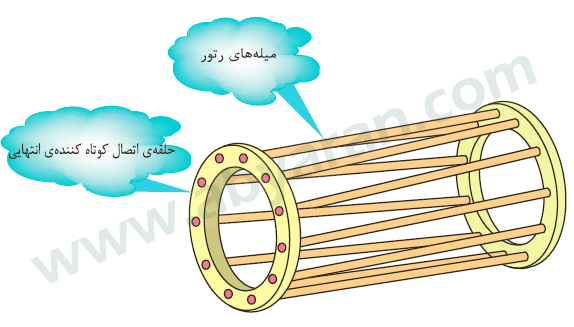

- روتور قفسی: این نوع روتور، از تعدادی میلههای مسی یا آلومینیومی (شکل ۷) تشکیل شده است که آنها را در داخل شیارهای ورقه مغناطیسی روتور تعبیه کردهاند. سپس این میلهها از هر دو طرف توسط دو حلقهی همجنس با میلهها (آلومینیوم یا مس) به هم متصل شدهاند.
- روتور سیم پیچی شده (Wound rotor): روی این نوع روتور سه دسته سیم پیچ با اختلاف مکانی ۱۲۰ درجه مانند استاتور ماشین القایی سه فاز با همان تعداد قطب پیچیده میشوند. این سیم پیچ ها نسبت به بدنه روتور عایق شده است.


نکات قابل توجه در رابطه با ماشینهای القایی روتور سیم پیچی عبارت است از:
- الف) تعداد شیارهای روتور همواره کمتر از تعداد شیارهای استاتور است.
- ب) تعداد قطبهای سیم پیچی روتور باید برابر با تعداد قطبهای سیم پیچی استاتور باشد.
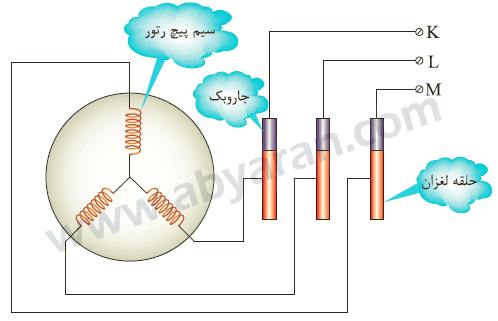
سیمپیچ های روتور اغلب با اتصال ستاره به هم وصل میشوند و سه سر دیگر سیم پیچها توسط حلقههای لغزان و جاروبک به بیرون روتور جهت اتصال به مقاومت راهانداز، انتقال داده میشوند. بدین ترتیب در ماشینهای القایی روتور سیم پیچی، امکان دسترسی به مدار داخلی روتور وجود دارد.
اساس کار موتورهای القایی
در تصویر زیر مدار الکتریکی موتور القایی یا الکتروموتور سه فاز روتور سیم پیچی شده مانند یک ترانسفورماتور سه فاز است. در واقع هر دو از اثر القای نیروی محرکه در سیم پیچ طرف دیگر استفاده می کنند بههمین دلیل به این موتورها، موتورهای القایی گفته میشود. البته در ساختار موتور القایی بین سیم استاتور (اولیه) و روتور(ثانویه) علاوه بر هسته مغناطیسی، فاصله هوایی نیز وجود دارد.
از آنجا که در قدرتهای یکسان، نیروی محرکه مغناطیسی بیشتری جهت غلبه بر تلفات مکانیکی روتور و مقاومت مغناطیسی ناشی از فاصله هوایی بین استاتور و روتور مورد نیاز است، بنابراین، جریان بیباری موتورهای القایی نسبت به ترانسفورماتورها بیشتر است.
پدیده میدان دوار در ماشینهای القایی
در این بخش پس از معرفی ساختار ماشین القایی سه فاز، ثابت میشود که چگونه با عبور جریان سه فاز از سه سیم پیچ استاتور ماشین القایی میتوان میدان دوار ایجاد کرد به طوری که این میدان پیرامون هسته استاتور گردش و شرایط لازم را برای چرخش روتور فراهم کند.
برای اثبات موضوعی که گفته شد، از معادلات ریاضی بهره میگیرند ولی چون میتوان این موضوع را با دلایل فیزیکی نیز شرح داد، برای اثبات میدان دوار از تشریح فیزیکی میدان استفاده میشود. در آغاز انواع میدانهای ایجاد شده توسط جریانهای مستقیم و متناوب یادآوری میشود.
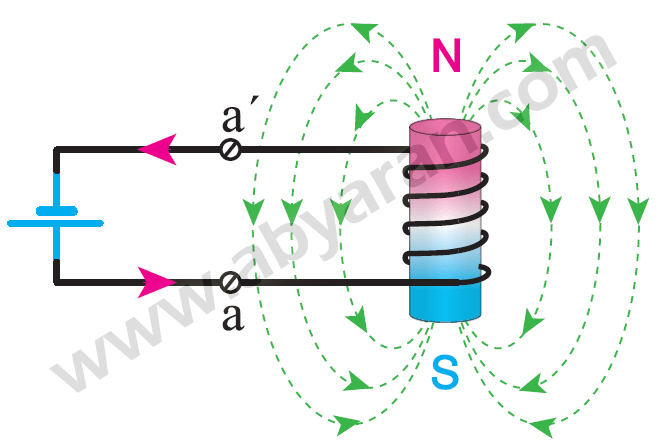
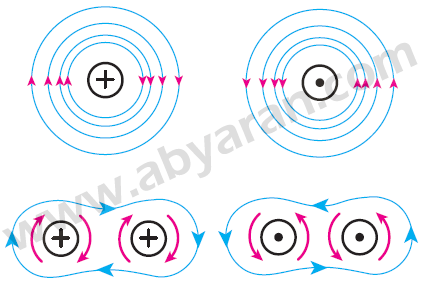
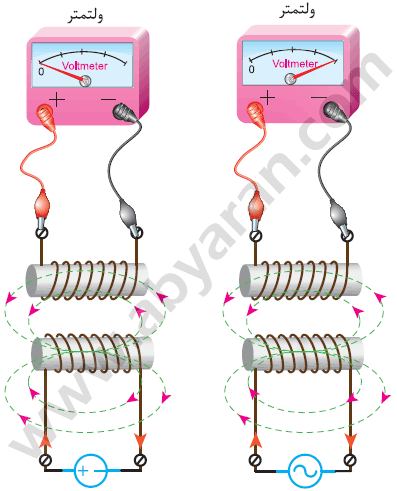
با عبور جریان DC از یک سیم پیچ میتوان میدان ثابت ایجاد کرد شکل (۱۱)، زیرا اندازه و جهت این میدان همواره ثابت است. همچنین با عبور جریان متناوب تک فاز میدانی متغیر ایجاد میشود که به صورت ضربانی جهت آن در هر نیم سیکل مرتب تغییر میکند که به آن میدان ضربانی میگویند.
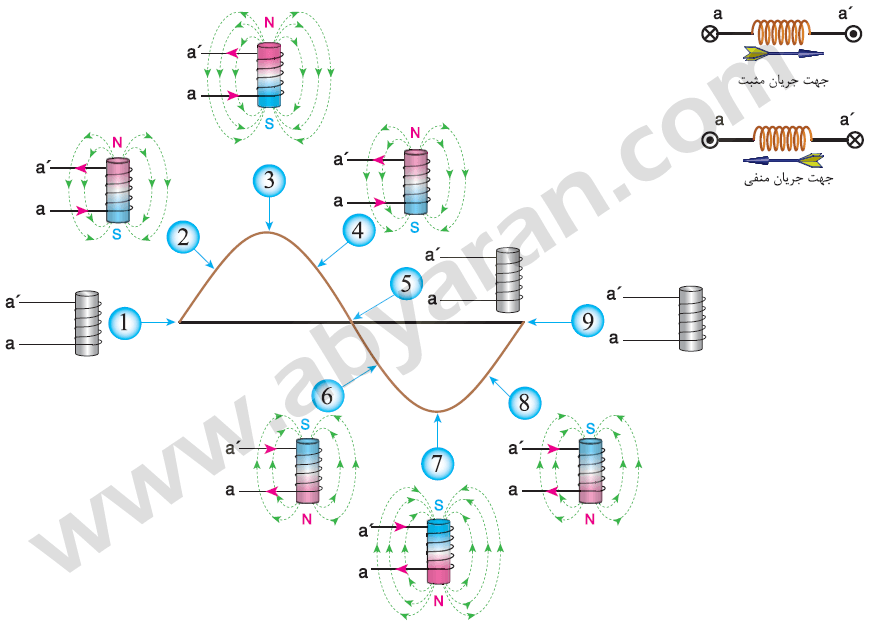
پیکان نشان داده شده در شکل ۱۲ جهت جریان فرضی وارد و خارج شده از سیم پیچ را نشان میدهد. در ادامه نشان داده میشود که با عبور جریانهای متناوب سه فاز در سه سیم (شکل ۱۳) میدانهای گردشی یا دوار ایجاد خواهد شد.
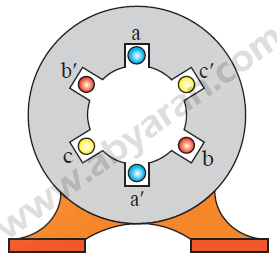
با توجه به شکل (۱۳-ب،ج)، سیم پیچ های سه فازc,b,a در بدنه استاتور، با اختلاف ۱۲۰ درجه مکانی نسبت به یکدیگر جاسازی شدهاند در این ماشین بازوی برگشت سیمپیچ های هر فاز استاتور، ماشین را به دو نیم تبدیل کرده است. یعنی بازوی رفت سیمپیچ مثلا a با بازوی برگشت آن یعنی a׳، ۱۸۰ درجه اختلاف مکانی دارد بنابراین در این ماشین القایی میدان دو قطبی ایجاد میشود.
برای شروع، انتهای سیمپیچ های سه فاز استاتور را (׳c׳,b,׳a) را با اتصال ستاره به هم متصل و ابتدای آنها یعنی (a,b,c) را به منبع برق سهفاز با ولتاژ مناسب، وصل میکنند. بلافاصله پس از اتصال برق سهفاز به سیمپیچهای استاتور، جریان الکتریکی در آن جاری میشود و سپس در هادیهای هر سیم پیچ متناسب با جهت جریان عبوری از آن میدان مغناطیسی ایجاد میشود.
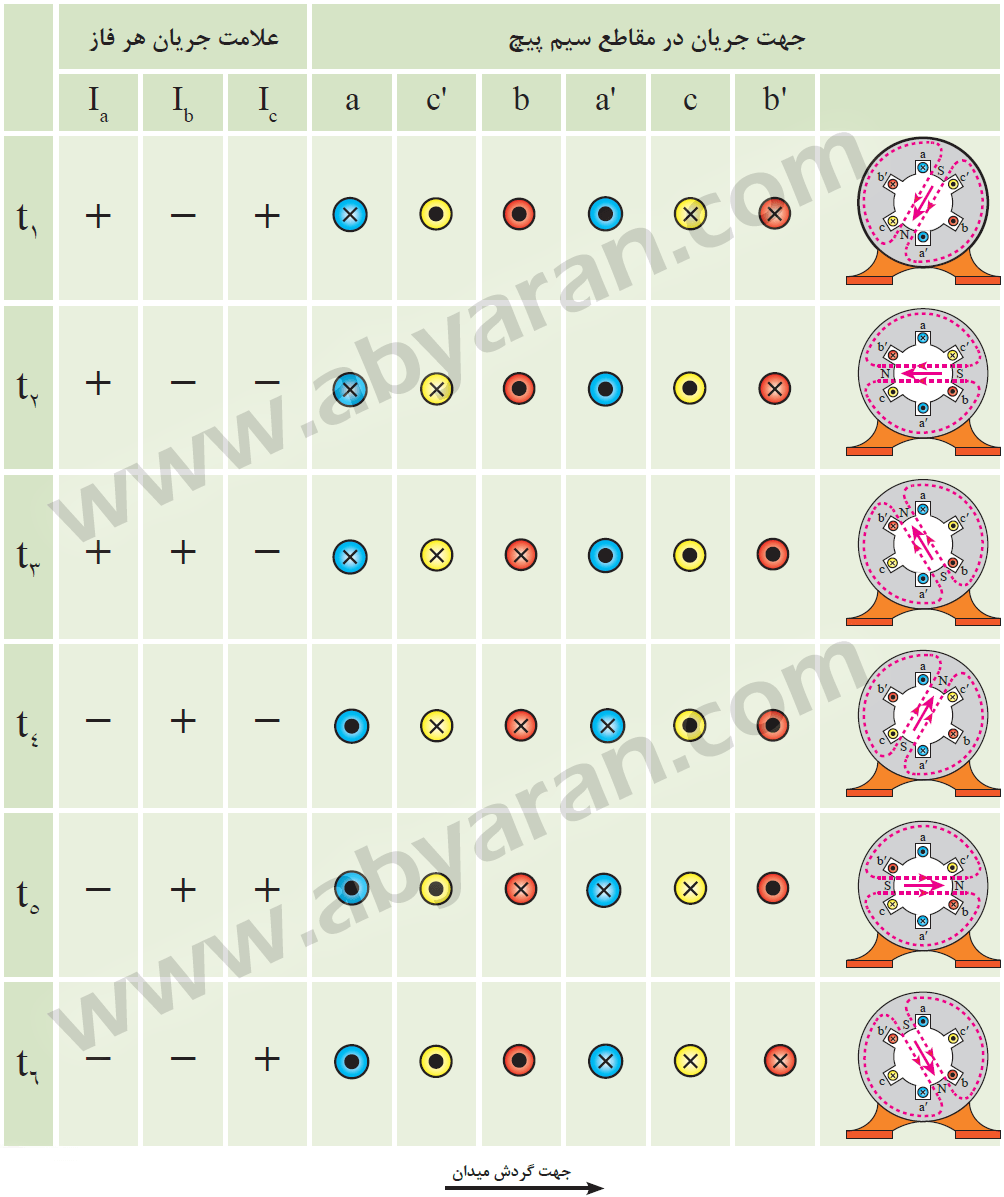
برای تحلیل آسانتر میدان دوار، اندازه و جهت جریانهای سه فاز در زمانهای t1 تا t6 در نظر گرفته میشود شکل (۱۴). در نتیجه فاصله هر یک از نمونه های زمانی ۶۰ درجه از یکدیگر می باشد. بنابراین با تحلیل این ۶ نقطه میتوان گردش کامل میدان دوار را در مسیر دایرهای (یعنی ۳۶۰ درجه) بررسی کرد. جهت جریان هادیهای هر شیار و وضعیت میدانهای مغناطیسی استاتور در هر یک از زمان های t1 تا t6 به کمک جدول (۱) به دست می آید.

چون شیارهای استاتور، هادیهای هر فاز را در خود جای دادهاند و جهت جریان هادیهای هر شیار در هر لحظه با توجه به فرض فوق قابل علامتگذاری هستند، لذا میتوان جدول (۱) را کامل کرد. بنابراین با توجه به میدان مغناطیسی اطراف هادی های همجوار، جهت میدان مغناطیسی ایجاد شده در هر لحظه به دست می آید.
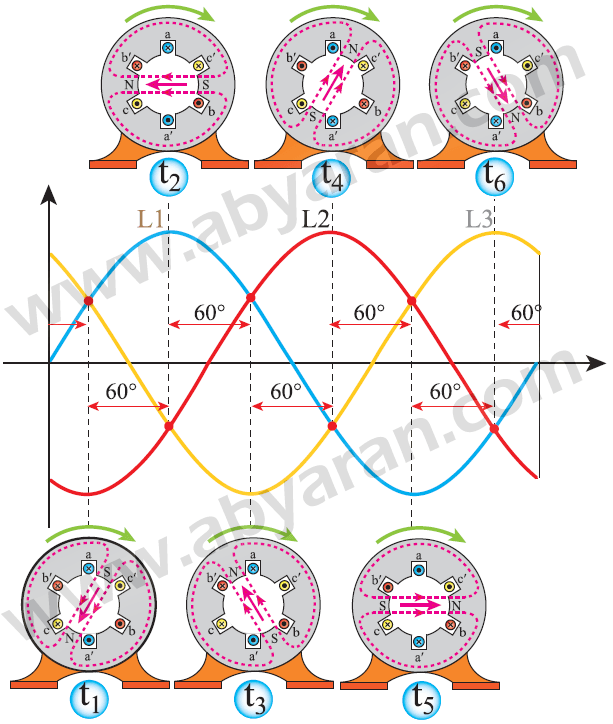
به عنوان نمونه با توجه به شکل موج جریانهای سینوسی سه فاز، در لحظهt1، فاز a مثبت، فاز b منفی و فاز c مثبت است. پس علامت جهت جریان در ابتدای سیمپیچ a، و در انتهای آن یعنی׳ a درج میشود. این علامتها برای فازهای دیگر نیز به همین ترتیب در سطر مربوط به هر زمان قرار داده میشود. با در نظر گرفتن جهت میدان مغناطیسی ایجاد شده از زمان t1 تا t6 میتوان نتیجه گرفت که میدان مغناطیسی در هسته استاتور میچرخد. این میدان در حال گردش را میدان دوار میگویند.
تغییر جهت چرخشی میدان دوار
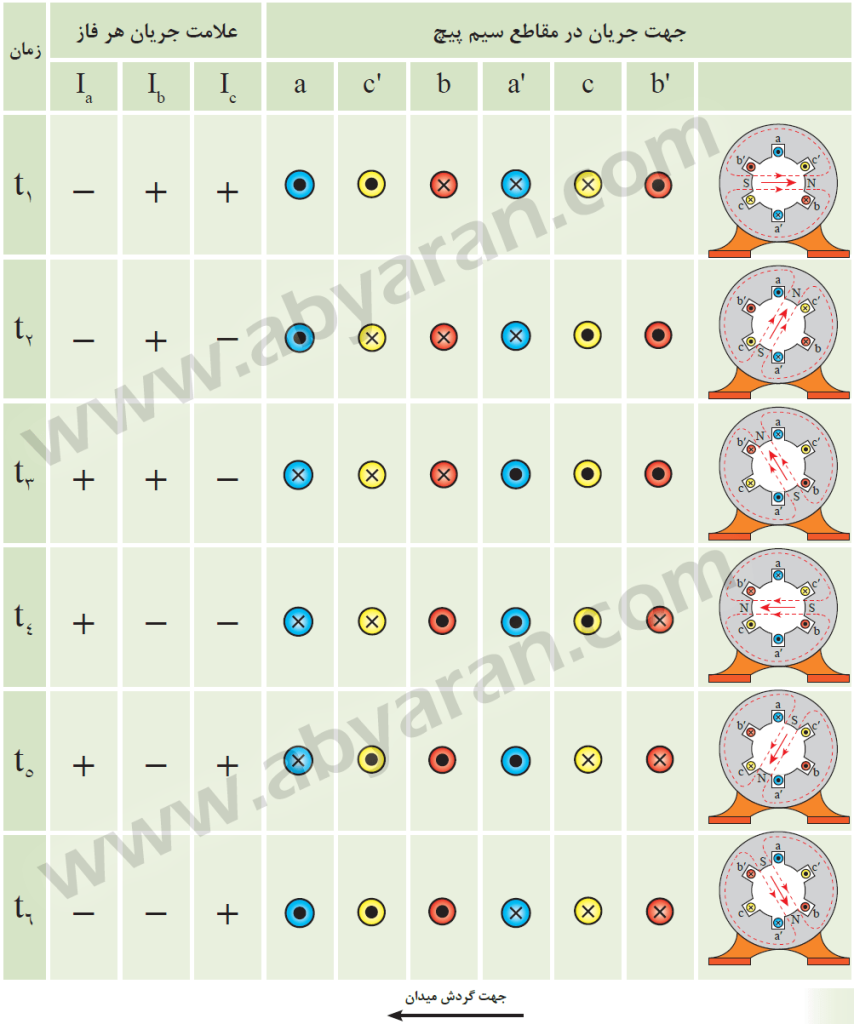
در صورتی که جای دو فاز از سه فاز متصل شده به ماشین القایی به اختیار عوض شود، میدان دوار ماشین القایی سه فاز تغییر جهت میدهد. این تغییر در جدول (۲) بر اساس شکل (۱۶) انجام شده است. شکل (۱۶) جهت چرخش میدان مغناطیسی دوار را با تعویض جای فاز a و b نمایش میدهد. از این روش برای تغییر جهت گردش موتور القایی (الکتروموتور) استفاده میشود.
عوامل مؤثر در سرعت میدان دوار
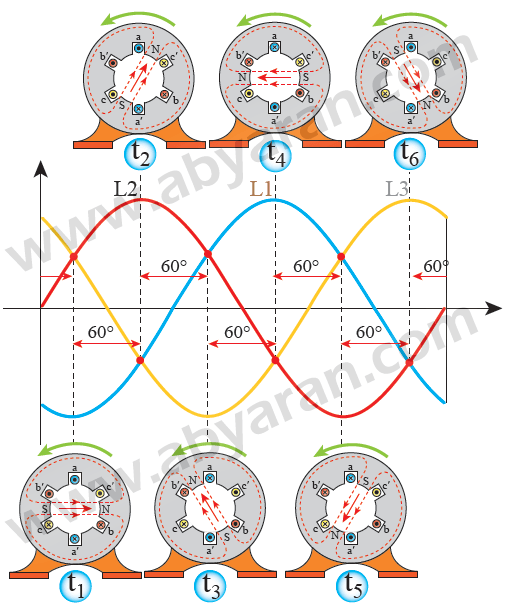
همانطور که ملاحظه کردید برای ترسیم میدان دوار از شکل موج جریان های سه فاز در فواصل منظم و در یک دوره تناوب استفاده میشود. حالا تصور کنید هر چه دوره تناوب در زمان کوتاهتری تکرار شود بدون شک سرعت چرخشی میدان دوار نیز بیشتر خواهد شد و بالعکس با افزایش زمان دوره تناوب سرعت میدان دوار کندتر میشود.
یکی از کمیتهای شبکه برق متناوب، فرکانس f است که با دوره تناوب T نسبت عکس دارد. پس میتوان نتیجه گرفت یکی از عوامل مؤثر بر سرعت میدان دوار، فرکانس شبکه است.
به علت اینکه فرکانس متناسب با عکس زمان تناوب است، بنابراین با کاهش فرکانس، سرعت چرخش میدان دوار، کم میشود و با افزایش فرکانس، سرعت چرخش میدان دوار زیاد میشود. سرعت میدان دوار ماشین القایی را با ns نمایش میدهند و آن را سرعت سنکرون مینامند. سرعت میدان دوار متناسب با فرکانس است بنابراین که با ns∝f مینویسیم.
جریانی که از سیمپیچ ها عبور میکند در یک دوره تناوب فقط یکبار تغییر جهت میدهند، میتوان نتیجه گرفت که قطبهای N و S میدان دوار در این مدت فقط یکبار عوض میشود. بنابراین در یک ماشین دو قطبی که قطبها (۳۶۰ درجه) محیط استاتور را اشغال کردهاند در یک دوره تناوب، میدان دوار یک دور محیط استاتور را طی میکند در حالی که در یک ماشین چهار قطبی که هر دو قطب آن (۱۸۰ درجه) محیط استاتور را اشغال کرده است.
در یک دوره تناوب، میدان دوار تنها نیم دور (۱۸۰ درجه) محیط استاتور را طی می کند. پس میتوان نتیجه گرفت، افزایش تعداد قطبهای استاتور باعث کم شدن سرعت میدان دوار میشود. بنابراین عامل دیگر تعیین کننده سرعت میدان دوار، تعداد قطبهای سیمبندی ماشین القایی (الکتروموتور) است.
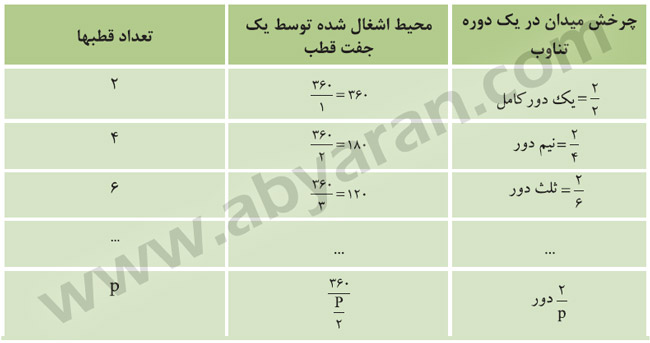
با مراجعه به جدول (۳) دیده میشود که میدان دوار ماشین چهار قطبی در مقایسه با ماشین دو قطبی در یک دوره تناوب نیم دور محیط استاتور را طی میکند. با توجه به جدول (۳) سرعت میدان دوار با رابطه ۲/p متناسب است.
ns∝ ۲/p
P تعداد قطبها
ns سرعت میدان دوار
رابطه سرعت میدان دوار با در نظر گرفتن هر دو عامل فرکانس و تعداد قطبهای سیمپیچی به صورت زیر نوشته میشود:
رابطهی (۱-۳):ns= 2xf/p
(ns) بر حسب دور در ثانیه
سرعت میدان دوار در رابطه (۱-۳) بر حسب دور بر ثانیه است ولی از آنجا که سرعت ماشینهای دوار را معمولا برحسب دور بر دقیقه RPM)) نمایش می دهند، لذا رابطه سرعت میدان دوار به صورت رابطه (۲-۳) خواهد شد.
رابطهی: ns= 120xf/p (3-2)
در رابطهی (۲-۳):
ns: سرعت میدان دوار بر حسب RPM
f: فرکانس شبکه برق بر حسب H
P: تعداد قطب های سیم بندی ماشین القایی
به یاد داشته باشید که فرکانس در شبکههای برق ثابت است در نتیجه حداکثر سرعت میدان دوار در ماشین القایی (الکتروموتور) دو قطبی ایجاد میشود.
مثال: سرعت میدان دوار یک ماشین ۲ قطبی در شبکه برق ایران با فرکانس (50Hz) چقدر است؟
ns=120xf/p = 120×50/2 = 3000 RPM
این سرعت بیشترین مقداری است که میدان دوار ماشین القایی در اتصال به شبکه برق کشور ایران میتواند داشته باشد.
نحوه ایجاد چرخش روتور در موتورهای القایی
تغییرات فوران عامل ایجاد نیروی محرکه القایی در سیمپیچ است. از آنجاکه جریان DC فوران با مقدار ثابت تولید میکند لذا سیم پیچ حامل جریان DC در سیمپیچ مجاور خود نیروی محرکه القا نمیکند.
با اتصال سیم پیچ استاتور ماشین القایی (الکتروموتور) روتور سیم پیچی شده به منبع ولتاژ متناوب و ایجاد میدان دوار در استاتور طبق قانون القای فارادی، نیروی محرکه ای متناسب با آهنگ تغییرات فوران در سیم پیچ های روتور القاء خواهد شد.
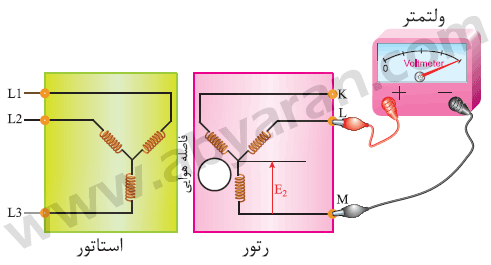
اما، با باز بودن مدار خروجی M,L,K روتور شکل (۱۸)، روتور حرکت نمی کند و با قرار دادن یک ولت متر مطابق شکل (۱۸) در دو سر سیم پیچی روتور می توان مقدار نیروی محرکه القایی سیم پیچی روتور را اندازه گرفت.
روتور در این حالت ساکن است و چرخش ندارد، این نیروی محرکه القایی را ولتاژ حالت سکون روتور مینامند و آن را با E2 نمایش میدهند.
در واقع با ایجاد میدان دوار استاتور، نیروی محرکه E2 در سیمپیچی روتور القاء میشود ولی از آنجا که جریانی از مدار روتور عبور نمیکند در نتیجه نیروی لورنس هم به سیمپیچی روتور وارد میشود. در صورتی که بخواهیم به روتور نیروی لورنس وارد شود باید در سیم پیچی روتور جریان جاری شود.
بنابراین اگر حلقههای خروجی مدار روتور (شکل ۱۹) به یکدیگر اتصال داده شوند و آمپرمتر در مسیر M و L قرار گیرد، مدار روتور بسته میشود و در سیمپیچی روتور جریان جاری میشود و نیروی لورنس پدید میآید. در نتیجه روتور حول محورش می گردد و تا زمانی که سیم پیچ استاتور به برق اتصال داشته باشد روتور به حرکت خود ادامه خواهد داد.
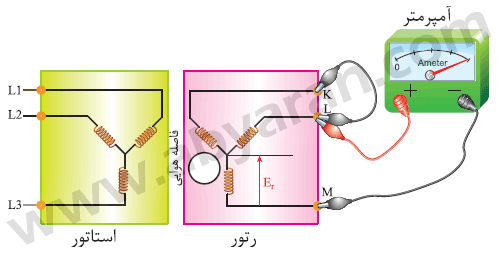
ولتاژ القاء شده در مدار بستهی روتور باعث جاری شدن جریان در سیمپیچ های آن میشود. آمپرمتر (شکل ۱۹) جریان یکی از فازهای سیم پیچ روتور را نشان میدهد. این جریان را جریان روتور مینامند و آن را با Ir نمایش میدهند.
موتورهای القایی از نوع روتور قفس سنجابی
شکل (۲۰) چگونگی چرخش روتور قفسی در موتورهای القایی (الکتروموتور ها) را به سادگی نمایش داده است. شما میتوانید با تهیه وسایل نشان داده شده، این آزمایش را انجام دهید. در این آزمایش با چرخاندن دسته متحرک، آهنربای دائم میچرخد و در پی آن دیسک آلومینیومی نیز که اندکی از آهنربا فاصله دارد به حرکت در میآید.
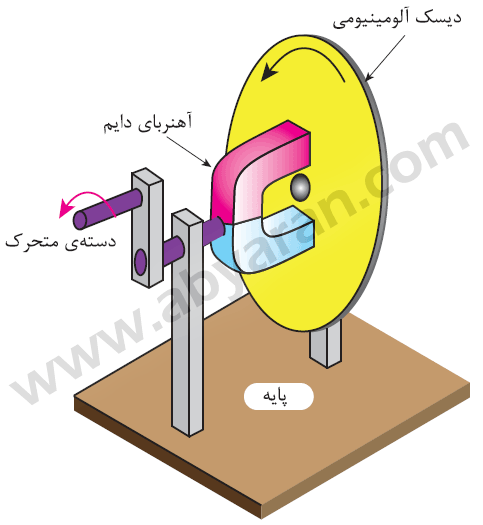
آیا با توجه به چرخش میدان و تغییر میدان مغناطیسی در دیسک آلومینیومی مطابق آنچه در شکل (۲۰) میبینید، میتوان نتیجه گرفت که عامل چرخش دیسک القای نیروی محرکه و ایجاد جریان القایی در آن است. در شکل (۲۱) ابتدا و انتهای مفتولها به یکدیگر متصل و در نتیجه مدار اتصال کوتاه شدهای در هادیهای روتور ایجاد شده است و از آنجا که شکل ایجاد شده شبیه یک قفس است، به همین دلیل به روتور شکل (۲۱) روتور قفسی میگویند.
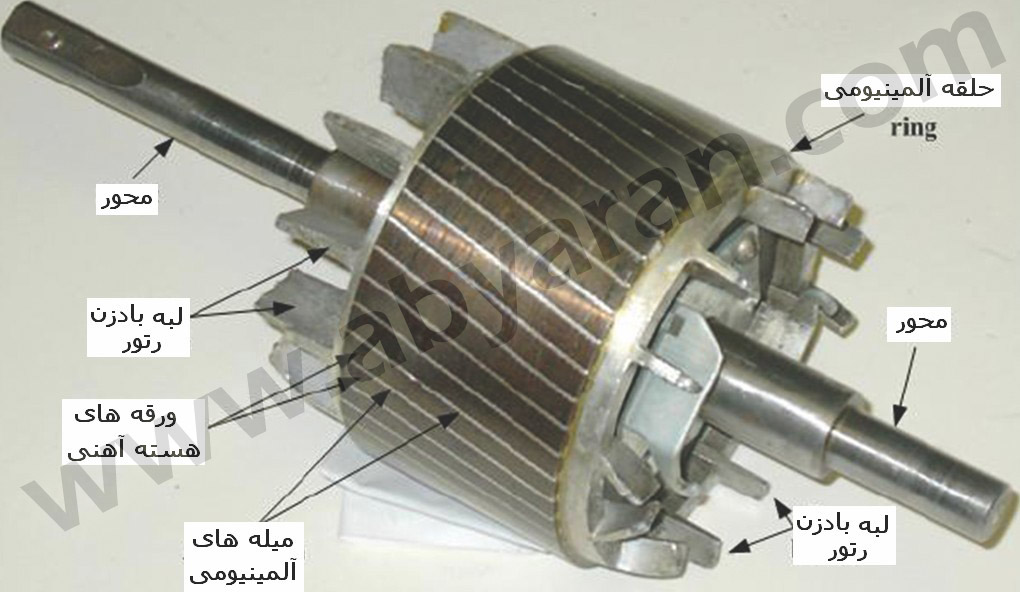
برای ساختن این نوع روتور ابتدا ورقههای هسته روتور را کنار یکدیگر قرار میدهند تا هستهی یکپارچه روتور تشکیل شود سپس آلومینیوم و یا گاهی مس ذوبشده را به داخل هسته روتور تزریق میکنند. مادههی مذاب تزریقشده در هسته پس از سرد شدن به شکل مفتولهایی در میآیند که در داخل هسته قالبگیری شده است. لذا این هادیها نسبت به هسته عایق نیستند.
از آنجا که شکل (۲۱) شبیه قفس سنجاب به نظر میرسد، ماشینهای القایی را که ساختمان روتور آنها این گونه است قفس سنجابی نیز میگویند.
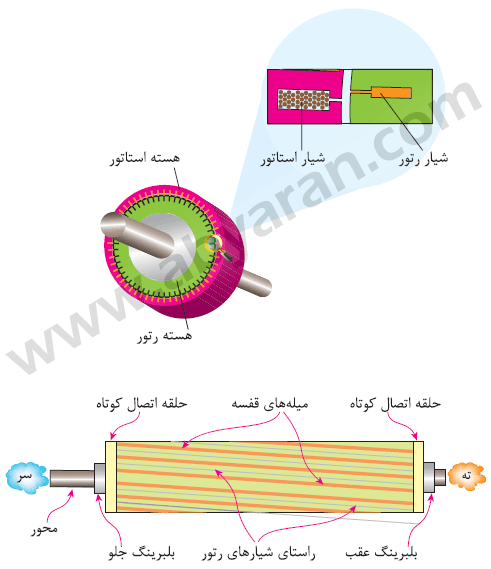
مطابق شکل (۲۲) در اغلب ماشینهای القایی (الکتروموتورها) شیارهای روتور با محور ماشین موازی نیستند یعنی شیارها نسبت به محور ماشین مورب است. این عمل باعث کاهش سر و صدای روتور در زمان چرخش آن میشود. معمولاً انحراف شیارهای روتور به اندازهٔ پهنای یک شیار استاتور در نظر گرفته میشود.
در ماشینهای القایی با شیارهای مورب، راهاندازی سریعتر و قابلیت تحمل اضافه بار در چنین ماشینهایی بیشتر است. ماشینهای القایی قفس سنجابی از نظر ساختمان سادهتر و از نظر اقتصادی به صرفهتر از ماشینهای روتور سیمپیچی شده هستند و کمتر به تعمیر و نگهداری احتیاج دارند.





بسیار عالی بود یاد گرفتیم
از بازخورد مثبتتان سپاسگزارم
دورود بر شما …دانش کاملی بود
سوال .،؟
آیا می شود موتورهای تکفاز را دوباره بصورت سه فاز سیم پیچی کرد؟
سلام. امکان راه اندازی موتور سه فاز با برق تک فاز با انجام برخی تغییرات وجود دارد، اما پاسخ سؤال شما خیر است.
هنوز نفهمیدم چرا تغییر جای دوفاز جهت میدان تغییر میده به صورت تئوری
سرو ته کلاف که عوض نمیشه فقط جای فازها عوض میشع در سه فاز مگه جهت جریان هر فاز ثابت نیس